
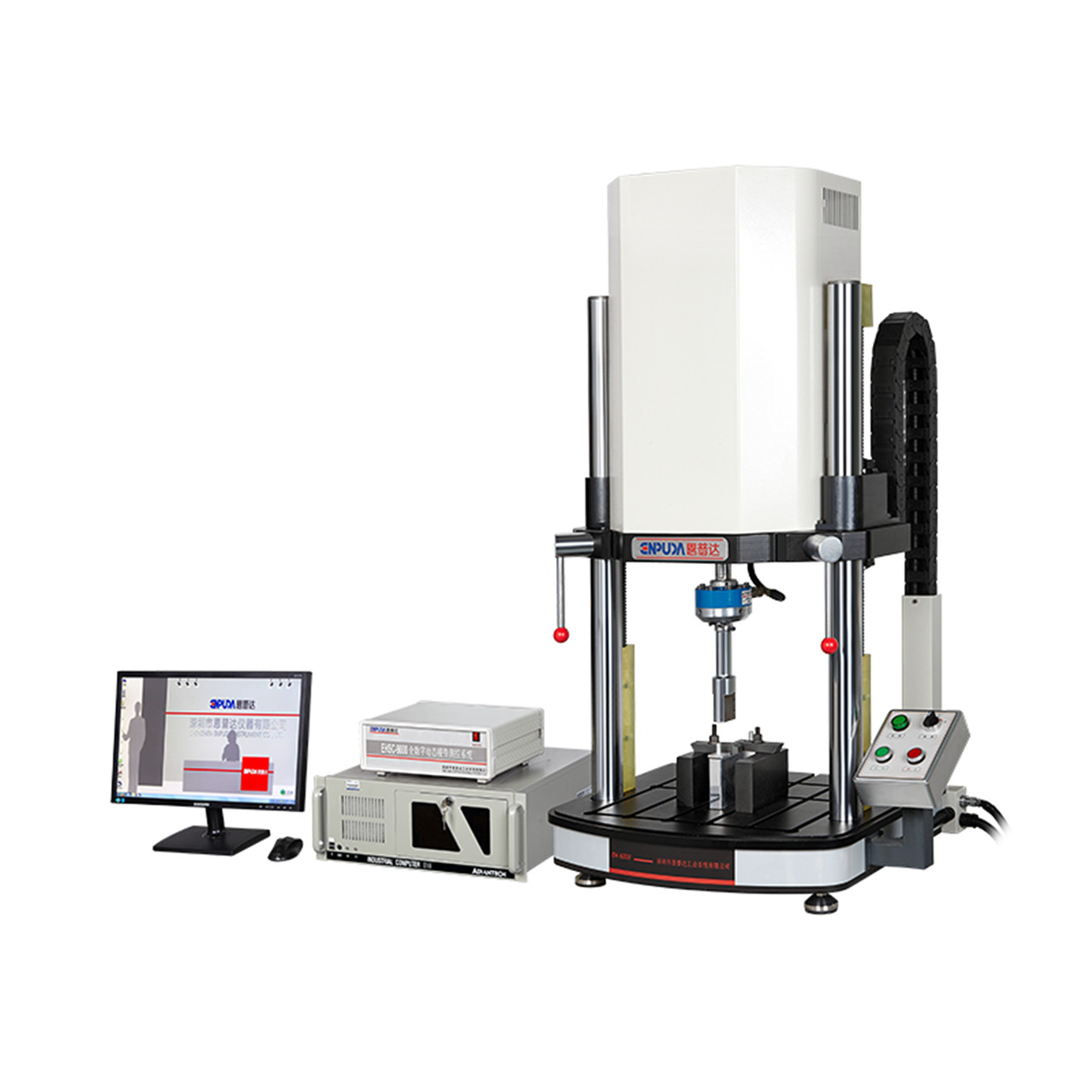


Mīkini hoʻokolohua uila



ʻAʻole mākou e hāʻawi wale i nā mīkini maʻamau, akā hana pū kekahi i nā mīkini a me LOGO e like me nā koi o ka mea kūʻai aku.E ʻoluʻolu e haʻi mai iā mākou i kāu mau koi a e hoʻāʻo mākou i ka maikaʻi loa e hoʻokō i kāu mau pono.
E ʻoluʻolu e hāʻawi i ka maʻamau hoʻāʻo āu e pono ai i kā mākou hui, e kōkua kā mākou hui iā ʻoe e hana i ka mīkini hoʻāʻo e kū i ka maʻamau hōʻike āu e pono ai.






| Hoʻohālike o ka mīkini hoʻāʻo | EH-6103 | EH-6303 | EH-6104 | EH-6204 | EH-6504 | |
| EH-6503 | EH-6304 | |||||
| ʻO ka haʻawe hoʻoikaika ikaika loa (kN) | ±1000N | ± 3000N | ±10KN | ±20KN | ±50KN | |
| ± 5000N | ±30KN | |||||
| Ka pinepine ho'āʻo (Hz) | 0.01~20Hz | |||||
| Nā manawa ola luhi | 0~108Hoʻonohonoho kūʻokoʻa | |||||
| ʻO ka hahau mea hoʻokele | ± 50、±75、±100、±150 a hana maʻamau | |||||
| Hoʻāʻo hoʻouka ʻana i ka nalu | ʻO ka nalu Sine, ka nalu triangle, ka nalu square, ka nalu oblique, ka nalu trapezoidal, ka nalu maʻamau i hui ʻia, etc. | |||||
| Ka pololei ana ana | Hoʻouka | ʻOi aku ka maikaʻi ma mua o ka waiwai i hōʻike ʻia ± 1%, ± 0.5%(State state;;Oi aku ma mua o ka waiwai i hōʻike ʻia ±2%(dynamic) | ||||
| deformation | ʻOi aku ka maikaʻi ma mua o ka waiwai i hōʻike ʻia ± 1%, ± 0.5%(State state;;Oi aku ma mua o ka waiwai i hōʻike ʻia ±2%(dynamic) | |||||
| ka hoʻoneʻe ʻana | ʻOi aku ka maikaʻi ma mua o ka waiwai i hōʻike ʻia ± 1%, ± 0.5% | |||||
| Ke ana ʻana o nā ʻāpana hoʻāʻo | 1 ~ 100% FS (piha piha), hiki ke hoʻonui ʻia i 0.4 ~ 100% FS | |||||
| Wahi hoʻāʻo (mm) | 400mm | 500mm | ||||
| laula ho'āʻo (mm) | ≦500mm(Me ka hoʻopaʻa ʻole) | ≦600mm(Me ka hoʻopaʻa ʻole) | ||||
| Mana kaʻa | 1.0kW | 2.0kW | 5.0kW | |||
| Manaʻo: Aia i ka hui ke kuleana e hoʻomaikaʻi i ka mea kani me ka ʻole o ka hoʻolaha ma hope o ka hoʻonui ʻana, e ʻoluʻolu e noi i nā kikoʻī i ka wā e kūkākūkā ai. | ||||||
E kākau i kāu leka ma aneʻi a hoʻouna mai iā mākou



